$$\text{???} = (MC)^2$$¶
Background¶
What if we know the relative likelihood, but want the probability distribution?
But what if $\int f(x)dx$ is hard, or you can't sample from $f$ directly?
This is the problem we will be trying to solve.
First approach¶
If space if bounded (integral is between $a,b$) we can use Monte Carlo to estimate $\int\limits_a^b f(x)dx$
- Pick $\alpha \in (a,b)$
- Compute $f(\alpha)/(b-a)$
- Repeat as necessary
- Compute the expected value of the computed values
What if hard?¶
What if we can't sample from $f(x)$ but can only determine likelihood ratios?
$$\frac{f(x)}{f(y)}$$Markov Chain Monte Carlo¶
The obligatory basics¶
A Markov Chain is a stochastic process (a collection of indexed random variables) such that $\mathbb{P}(X_n=x|X_0,X_1,...,X_{n-1}) = \mathbb{P}(X_n=x|X_{n-1})$.
In other words, the conditional probabilities only depend on the last state, not on any deeper history.
We call the set of all possible values of $X_i$ the state space and denote it by, $\chi$.
Transition Matrix¶
Let $p_{ij} = \mathbb{P}(X_1 = j | X_0 = i)$. We call the matrix $(p_{ij})$ the Transition Matrix of $X$ and denote it $P$.
Let $\mu_n = \left(\mathbb{P}(X_n=0), \mathbb{P}(X_n=1),..., \mathbb{P}(X_n=l)\right)$ be the row vector corresponding to the "probabilities" of being at each state at the $n$th point in time (iteration).
Claim: $\mu_{i+1} = \mu_0P^{i+1}$
So: $\mu_1 = \mu_0P$.
Stationary Distributions¶
We say that a distribution $\pi$ is stationary if
$$\begin{gather*}\pi P = \pi\end{gather*}$$Main Theorem:¶
An irreducible, ergotic Markov Chain $\{X_n\}$ has a unique stationary distribution, $\pi$. The limiting distribution exists and is equal to $\pi$. And furthermore, if $g$ is any bounded function, then with probability 1:
$$\lim\limits_{N\to\infty}\frac{1}{N}\sum\limits_{n=1}^Ng(X_n) \rightarrow E_\pi(g)$$¶
Random-Walk-Metropolis - Hastings:¶
Let $f(x)$ be the relative likelihood function of our desired distribution.
$q(y|x)$ known distribution easily sampled from (generally taken to be $N(x,b^2)$)
1) Given $X_0,X_1,...,X_i$, pick $Y \sim q(y|X_i)$
2) Compute $r(X_i,Y) = \min\left(\frac{f(Y)q(X_i|Y)}{f(X_i)q(Y|X_i)}, 1\right)$
3) Pick $a \sim U(0,1)$
4) Set $X_{i+1} = \begin{cases} Y & \text{if } a < r \\ X_i & \text{otherwise}\end{cases}$
The Confidence Builder:¶
We would like to sample from and obtain a histogram of the Cauchy distribution:
$$f(x) = \frac{1}{\pi}\frac{1}{1+x^2}$$Note: Since $q$ is symmetric, $q(x|y) = q(y|x)$!
def metropolis_hastings(f, q, initial_state, num_iters):
MC = []
X_i = initial_state
for i in range(int(num_iters)):
Y = q(X_i)
r = min(f(Y)/f(X_i), 1)
a = np.random.uniform()
if a < r:
X_i = Y
MC.append(X_i)
return MC
def cauchy_dist(x):
return 1/(np.pi*(1 + x**2))
def q(scale):
return lambda x: np.random.normal(loc=x, scale=scale)
from scipy.stats import cauchy
CauchyInterval = np.linspace(cauchy.ppf(0.01),
cauchy.ppf(0.99),
100);
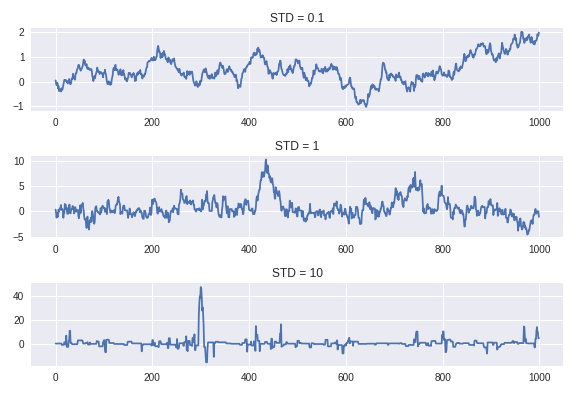
std01 = metropolis_hastings(cauchy_dist, q(0.1), 0, 1000)
tmpHist = plt.hist(std01, bins=20, normed=True);
tmpLnSp = np.linspace(min(tmpHist[1]),
max(tmpHist[1]),100)
plt.plot(tmpLnSp, cauchy.pdf(tmpLnSp), 'r-')
plt.show();

Estimation:¶
$$q(y|x) \sim N(0,b^2)$$
Another Aspect¶
How is this happening???¶
A property called detailed balance, which means, $$\pi_ip_{ij} = p_{ji}\pi_j$$
or in the continuous case: $$f(x)P_{xy} = f(y)P_{yx}$$
But we don't need to go over that... Unless you wanna...
Proof?¶
Let $f$ be the desired distribution (in our example, it was the Cauchy Distribution), and let $q(y|x)$ be the distribution we draw from.
First we'll show that detailed balance implies $\pi$ (or $f$ if continuous) is the stable distribution!
Let $\pi_ip_{ij} = \pi_jp_{ji}$ for discrete or for continuous $f(i)P_{ij}=P_{ji}f(j)$
$$\begin{align*} (\pi P)_i =& \sum\limits_j\pi_jP_{ji} & (fP)(x)=&\int f(y)p(x|y)dy\\ =&\sum\limits_j\pi_iP_{ij} & =& \int f(x)p(y|x)dy\\ =&\pi_i\sum\limits_jP_{ij} & =& f(x)\int p(y|x)dy\\ =&\pi_i & =& f(x) \end{align*}$$Now we'll show that our MCMC has the detailed balance property.
WLOG: Assume $f(x)q(x|y) > f(y)q(y|x)$.
Note: $r(x,y) = \frac{f(y)q(x|y)}{f(x)q(y|x)}$, and $r(y,x) = 1$.
Then,
$$\begin{align*} \pi_xp_{xy} =& f(x)p(x\rightarrow y) & \pi_yp_{yx} =& f(y)p(y\rightarrow x)\\ =& f(x)\left[q(y|x)\cdot r(x,y)\right] & =&f(y)\left[q(x|y)\cdot r(y,x)\right]\\ =& f(y)q(x|y) & =&f(y)q(x|y) \end{align*}$$The intuition¶
We want equal hopportunity:
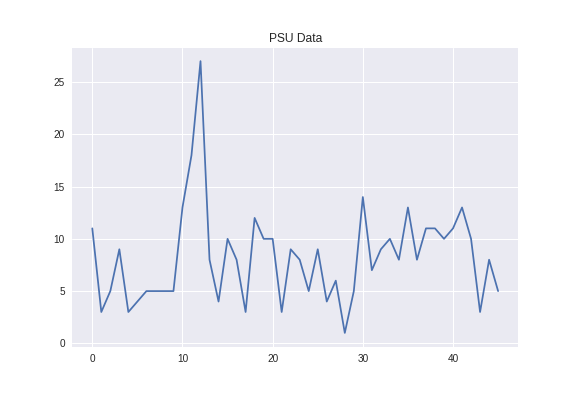
$$f(x)p(x|y) = f(y)p(y|x)$$Modeling Change Point Models in Astrostatistics.¶
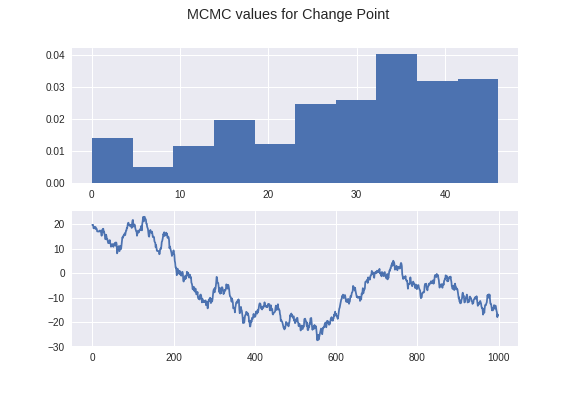
Potential Issues with RWMetropolis-Hastings:¶
- Requires $f$ to be defined on all of $\mathbb{R}$
- So transform as needed
- Curse of dimensionality in tuning parameters
Other forms¶
Gibbs Sampling
- Turn high dimensional sampling into iterative one-dimensional sampling
Gibbs with Metropolis-Hastings